Jogurttitölkin ravistelun optimointi
Jukka Liukkonen
Mat. yo. evp.
Johdanto
Kun litran jogurttitölkki kaadetaan niin tyhjäksi kuin voidaan ilman erikoistoimenpiteitä, tölkin seinämiin jää vielä jonkin verran jogurttia. Haluttaessa puhdistaa tölkin sisäseinämät jogurtista ennen kartonkikeräykseen laittamista tölkkiin kaadetaan vettä ja ravistellaan. Kuinka paljon vettä tölkkiin tulee kaataa, jotta ravistelu olisi mahdollisimman tehokasta?
Jos tölkki laitetaan täyteen vettä, vesi ei juurikaan pääse liikkumaan tölkin sisällä ravistelun aikana, ja jogurttijäämiin ei kohdistu irrottavaa iskuvaikutusta. Toisaalta, jos vettä on vain vähän tölkin tilavuuteen verrattuna, vesi kyllä pääsee liikkumaan villistikin, mutta mitättömän massan takia veden iskuvaikutus on pieni. Olisiko optimaalinen vesimäärä esimerkiksi puolet tölkin tilavuudesta?
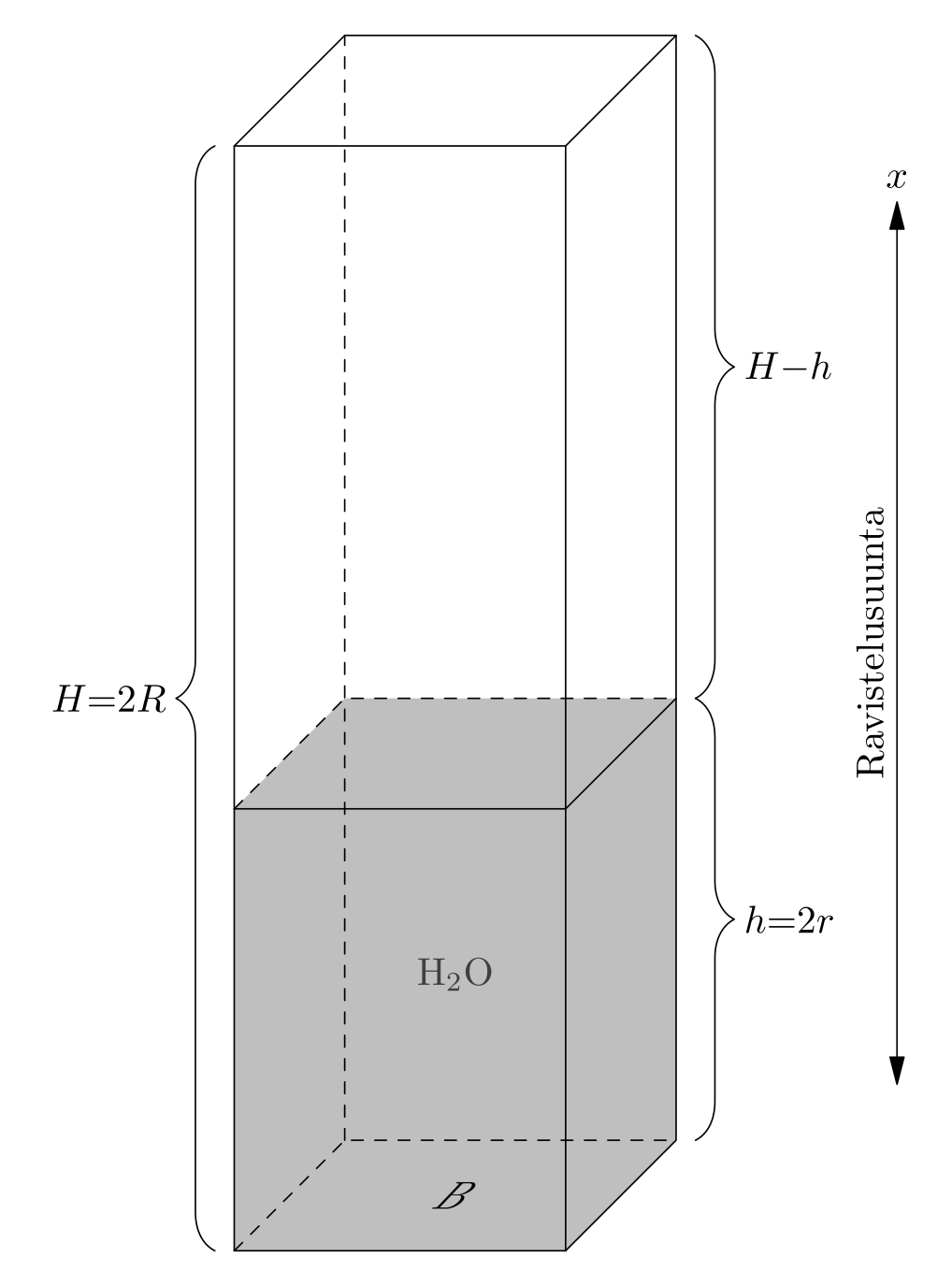
Vapaa-ajan hupipohdinnoissa ei ole järkevää lähestyä probleemaa liian järeillä työkaluilla, kuten tällä kertaa virtausmekaniikan monimutkaisten mallien ja varsinkaan Navier-Stokes-yhtälöiden kautta. Artikkelissa tarkastellaan äärimmäisen pelkistettyä mallia. Siinä vesi on korvattu kiinteällä kappaleella, joka liukuu jogurttitölkin sisällä tölkin päästä päähän kitkattomasti. Kappaleen lisäksi tölkin sisällä ei ole muuta ainetta, kuten esimerkiksi ilmaa. Tölkki ja kappale ovat suorakulmaisen särmiön muotoisia niin, että kappaleen muoto ja koko vastaavat pystysuoraan tölkkiin kaadettua vesimassaa sen jälkeen, kun veden aaltoilu on tasaantunut. Laskuissa painovoiman vaikutus jätetään huomiotta; ravisteluliike voidaan ajatella keittiön lattian suuntaiseksi.
Tölkkiä edestakaisin ravistettaessa kappale törmää täysin kimmottomasti vuoron perään tölkin pohjaan ja kanteen. Pakotetun edestakaisen liikkeen malliksi otetaan yksinkertaisuuden vuoksi harmoninen värähtely. Ravistelun tehokkuuden mittarina käytetään kappaleen törmäyshetken liike-energiaa tölkin mukana kulkevan koordinaatiston suhteen. Energia on kykyä tehdä työtä, tässä tapauksessa puhdistustyötä. Kun todellisessa tilanteessa vesi törmäyksen voimasta hajoaa erisuuntaisiksi roiskeiksi, nämä roiskeet liike-energiallaan irrottavat jogurtin jäämiä seinämistä. Osa energiasta muuttuu lämmöksi, ääneksi jne., mutta ravistaja kompensoi häviöt syöttämällä systeemiin lisää liike-energiaa.
Vaikka malli on simppeli, sen antama tulos on luultavasti tarpeeksi tarkka riittääkseen ohjeeksi keittiöfyysikolle. Lisäksi mallista kumpuaa matemaattisesti mielenkiintoinen raja-arvotehtävä.
Mallin tarkempi esittely
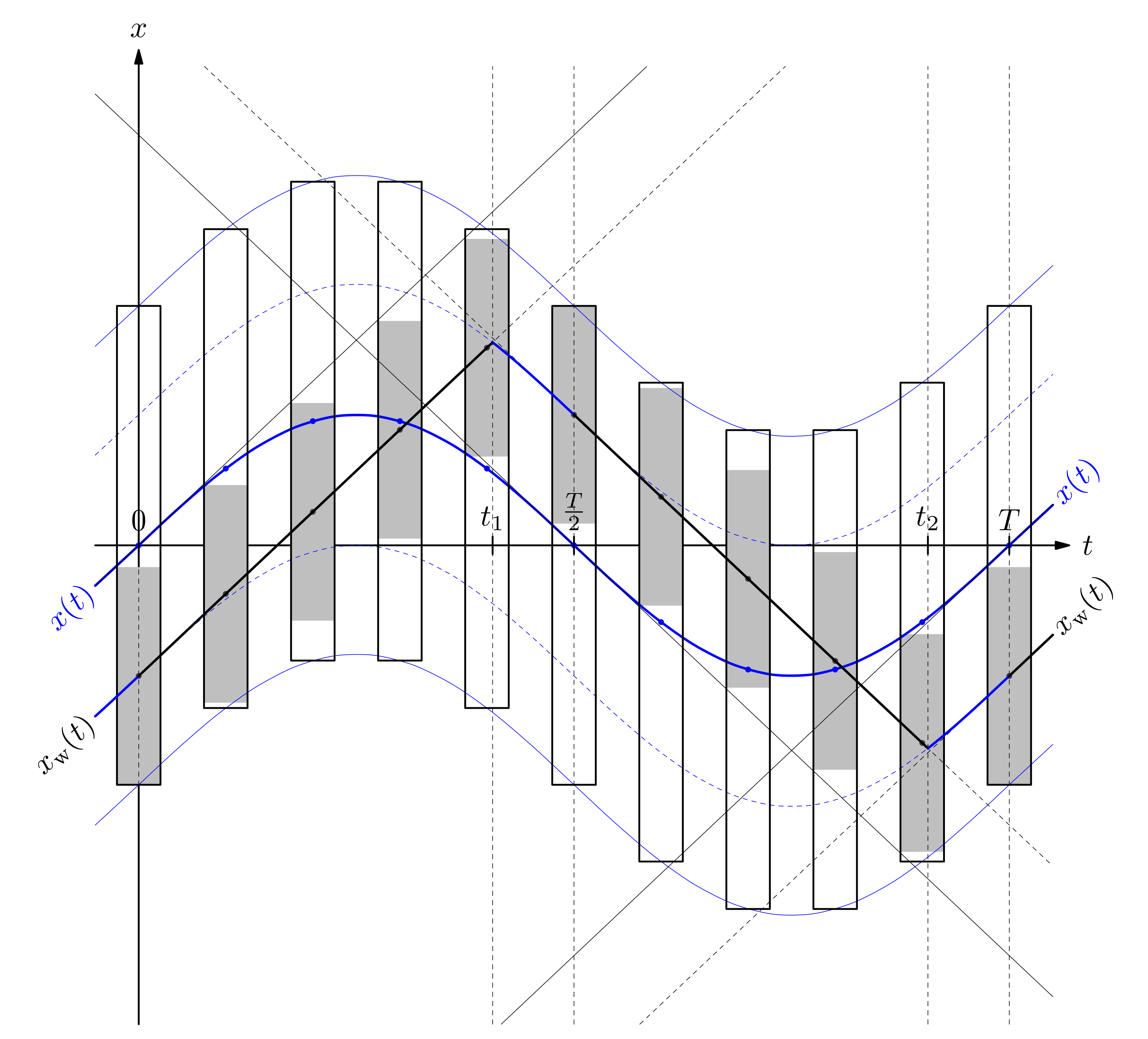
Tölkin ja samalla sen sisällä liukuvan kappaleen pohja olkoot neliön muotoiset. Laskujen kannalta pohjan muoto ei ole tärkeä, kunhan sen ala \(B\) on tiedossa (\(B\) \(<\) bottom). Kappaleen korkeus on \(h=2r\). Se vastaa tölkkiin kaadetun veden syvyyttä. Tölkin korkeus on \(H=2R\). Osamäärää \(h/H=r/R\) sanotaan täyttösuhteeksi. Oheisissa kuvissa havaitsija on kääntänyt päänsä sellaiseen asentoon, että hänen mielestään tölkkiä liikutetaan pystysuunnassa edestakaisin. Tölkin keskipisteen paikka \(x(t)\) ajan \(t\) funktiona piirtää \((t,x)\) -koordinaatistoon sinikäyrän \[x(t) = A\sin\omega t,\] missä \(A>0\) on värähdysliikkeen amplitudi, puolet liikkeen ääripäiden välisestä etäisyydestä. Osamäärää \(R/A\) kutsutaan ravistussuhteeksi. Kun \(T\) on värähdysjakson ajallinen pituus, ja \(f=1/T\) on värähtelytaajuus, kulmataajuudella \(\omega\) (so. montako radiaania sekunnissa) on lauseke \[\omega = 2\pi f = \frac{2\pi}{T}\,.\]
Tölkin vauhti eli nopeuden \[v(t) = \frac{\text{d}x}{\text{d}t} = A\omega\cos\omega t\] itseisarvo on suurimmillaan, kun \(\omega t=n\pi\) eli \[t = \frac{n\pi}{\omega} = n\,\frac{T}{2}\,,\quad n\in{\mathbb Z},\] siis esimerkiksi hetkillä \(t=0\) ja \(t=T/2\). Tölkin kiihtyvyys on \[a(t) = \frac{\text{d}v}{\text{d}t} = -A\omega^2\sin\omega t.\] Se on positiivinen, kun \(-\pi<\omega t<0\) eli kun \[-\frac{T}{2}<t<0.\] Hetkellä \(t=0\) oletetaan, että vettä vastaava kappale on tölkin pohjalla, jolloin kappaleen painopisteen paikka ja nopeus ovat vastaavasti (w \(<\) water) \[{x_{\rm w}}(0) = -R+r,\quad {v_{\rm w}}(0) = v(0) = A\omega.\] Välittömästi hetken \(t=0\) jälkeen tölkin liike ylöspäin alkaa hidastua, kun taas kappale jatkaa tasaisella nopeudella \(A\omega\) törmätäkseen lopulta tölkin kanteen. Juuri ennen törmäystä kappaleen painopisteen paikkakoordinaatti ja nopeus ovat \[{x_{\rm w}}(t) = -R+r+A\omega t,\quad {v_{\rm w}}(t) = A\omega.\] Ks. kuva 2.
Törmäyksen analyysi
Ensimmäisen törmäyksen tapahtuessa \[{x_{\rm w}}(t) = x(t) + R - r,\] Sijoittamalla paikkakoordinaattien lausekkeet paikoilleen saadaan yhtälö \[-R+r+A\omega t = A\sin\omega t + R - r,\] joka sievenee törmäysehdoksi \[\boxed{\omega t - \sin\omega t = \frac{2(R-r)}{A}}\,.\] Tässä \(\omega\), \(R\) ja \(A\) ovat positiivisia vakioita. Törmäysehto sitoo muuttujat \(r\) ja \(t\) toisiinsa. Tavoitteena on löytää sellainen muuttujan \(r\) arvo, jolla törmäysenergia maksimoituu.
Lausekkeiden yksinkertaistamiseksi otetaan käyttöön uudet muuttujat \[\alpha = \omega t \quad\text{ja}\quad \beta = \frac{2(R-r)}{A}\,,\] jolloin \[t = \frac{\alpha}{\omega} \quad\text{ja}\quad r = R-\frac{A\beta}{2}\,.\] Kun määritellään funkio \[\varphi:[0,\infty[\,\to[0,\infty[,\quad \varphi(\alpha) = \alpha-\sin\alpha,\] törmäysehto saa muodon \[\boxed{\varphi(\alpha) = \beta}\,.\] Funktio \(\varphi\) on jatkuva ja derivoituva. Derivaattaa ja raja-arvoa tutkimalla havaitaan, että \(\varphi\) on aidosti kasvava bijektio. Kappaleen nopeuden muutos törmäyshetkellä \(t\) on \[v(t)-{v_{\rm w}}(t) = A\omega\cos\omega t - A\omega = A\omega(\cos\alpha - 1).\]
Kun \(\rho\) on kappaleen tiheys, kappaleen massa on \[\begin{split} m &= 2Br\rho = 2B\left(R-\frac{A\beta}{2}\right)\rho = B\rho(2R-A\beta) \\[1ex] &= B\rho\big(2R-A\varphi(\alpha)\big). \end{split}\] Kappaleen liike-energia tölkin suhteen törmäyksen sattuessa1 on \[\begin{split} E_{\rm k} &= \frac{1}{2}\,m\big(v(t)-{v_{\rm w}}(t)\big)^2 \\[1ex] &= \frac{1}{2}\,B\rho\big(2R-A\varphi(\alpha)\big)A^2\omega^2(\cos\alpha - 1)^2 \\[1ex] &= \frac{1}{2}\,A^3\omega^2 B\rho\,\Phi(\alpha), \end{split}\] missä \[\begin{split} \Phi(\alpha) &= \big(2Q-\varphi(\alpha)\big)(\cos\alpha - 1)^2 \\ &= (2Q-\alpha+\sin\alpha)(1-\cos\alpha)^2, \end{split}\] kun ravistussuhdetta merkitään \[Q = \frac{R}{A}\,.\] Toistaiseksi \(R\) ja \(A\) ovat vakioita. Täten myös \(Q\) on vakio, kunnes toisin mainitaan.
Liike-energian maksimointi
Koska \(A\), \(\omega\), \(B\) ja \(\rho\) ovat vakioita, törmäyksen liike-energia on suurimmillaan, kun \(\Phi(\alpha)\) saavuttaa maksiminsa. Vastaava muuttujan \(\alpha\) arvo on funktion \(\Phi\) maksimikohta. Huomaa, että törmäysenergian maksimiarvo riippuu parametrista \(A\), mutta maksimikohta riippuu vain ravistussuhteesta \(Q\). Siksi maksimikohdalle käytetään myöhemmin merkintää \(\alpha_{{}_Q}\).
Aikavälillä \(t\ge 0\) pätee \(\alpha\ge 0\). Koska \[\Phi(\alpha+2\pi) = (2Q-\alpha-2\pi+\sin\alpha)(1-\cos\alpha)^2 \le \Phi(\alpha),\] funktio \(\Phi:[0,\infty[\,\to{\mathbb RR}\) saavuttaa suurimman arvonsa välillä \([0,2\pi[\). Itse asiassa \(\Phi\) saavuttaa suurimman arvonsa välillä \([0,\pi]\), mikä näytetään kahdessa osassa seuraavalla tavalla:
Tapauksessa \(\pi\le\alpha<\tfrac{3\pi}{2}\) on \(\tfrac{\pi}{2}<2\pi-\alpha\le\pi\), ja \[\begin{split} &\Phi(2\pi-\alpha) \\[1ex] &\;= \big(2Q - \underbrace{(2\pi-\alpha)}_{\le\alpha} + \underbrace{\sin(2\pi-\alpha)}_{\ge 0\ge\sin\alpha}\big) \big(1-\underbrace{\cos(2\pi-\alpha)}_{=\cos\alpha}\big)^2 \\[1ex] &\;\ge (2Q-\alpha+\sin\alpha)(1-\cos\alpha)^2 \\[1ex] &\;= \Phi(\alpha). \end{split}\] Tapauksessa \(\tfrac{3\pi}{2}\le\alpha<2\pi\) on \(\tfrac{\pi}{2}\le\alpha-\pi<\pi\), ja \[\begin{split} &\Phi(\alpha-\pi) \\[1ex] &\;= \big(2Q - \underbrace{(\alpha-\pi)}_{<\alpha} + \underbrace{\sin(\alpha-\pi)}_{>0>\sin\alpha}\big) \big(1-\underbrace{\cos(\alpha-\pi)}_{\le 0\le\cos\alpha}\big)^2 \\[1ex] &\;\ge (\underbrace{2Q-\alpha+\sin\alpha}_{=2r/A>0})(1-\cos\alpha)^2 \\[1ex] &\;= \Phi(\alpha). \end{split}\] Väite funktion \(\Phi\) maksimikohdan sijainnista välillä \([0,\pi]\) tuli näin todistetuksi. Törmäysehdosta ja muuttujan \(\beta\) määritelmästä saadaan toisaalta
\[\alpha = \beta+\sin\alpha \le \beta+1 = \frac{2(R-r)}{A}+1 \le \frac{2R}{A}+1 = 2Q+1.\] Kun merkitään \[\overline{\alpha} = \min\left\{\pi,\;2Q+1\right\},\] suurimman arvon etsiminen voidaan rajoittaa välille \([0,\overline{\alpha}]\). Ääriarvotehtävän ratkaiseminen analyyttisesti esimerkiksi etsimällä funktion \(\Phi\) derivaatan nollakohdat näyttää mahdottomalta. Onko se mahdotonta, sitä ei ryhdytä tässä arvailemaan, vaan tyydytään numeeriseen ratkaisuun ja riittävän tarkkaan likiarvoon etenkin, kun itse malli on reaalimaailman tilanteen hyvin karkea approksimaatio. Numeerinen ratkaisu tuotetaan seuraavasti:
Lue syötteenä ravistussuhde \(Q=\displaystyle\frac{R}{A}\) .
Laske \(\overline{\alpha} = \min\left\{\pi,\;2Q+1\right\}\).
Generoi tarpeeksi tiheä tasavälinen pisteistö \(\alpha_1,\ldots,\alpha_n\), jolle \[0=\alpha_1<\alpha_2<\ldots<\alpha_{n-1}<\alpha_n=\overline{\alpha}.\]
Laske \(\Phi(\alpha_1),\ldots,\Phi(\alpha_n)\) ja valitse luvuista suurin, olkoon se \(\Phi(\alpha_k)\).
Laske \(\beta_k=\alpha_k-\sin\alpha_k\).
Laske ja palauta optimaalinen täyttösuhde \[\displaystyle\frac{r_k}{R}=1-\displaystyle\frac{\beta_k}{2Q}\,.\]
Vastaava ensimmäisen törmäyksen ajankohta muodossa \(\displaystyle\frac{t_k}{T}=\displaystyle\frac{\alpha_k}{2\pi}\) saattaa niin ikään olla kiinnostava.
Numeerisesti laskettuja tuloksia
Arkinen ravistustilanne keittiössä
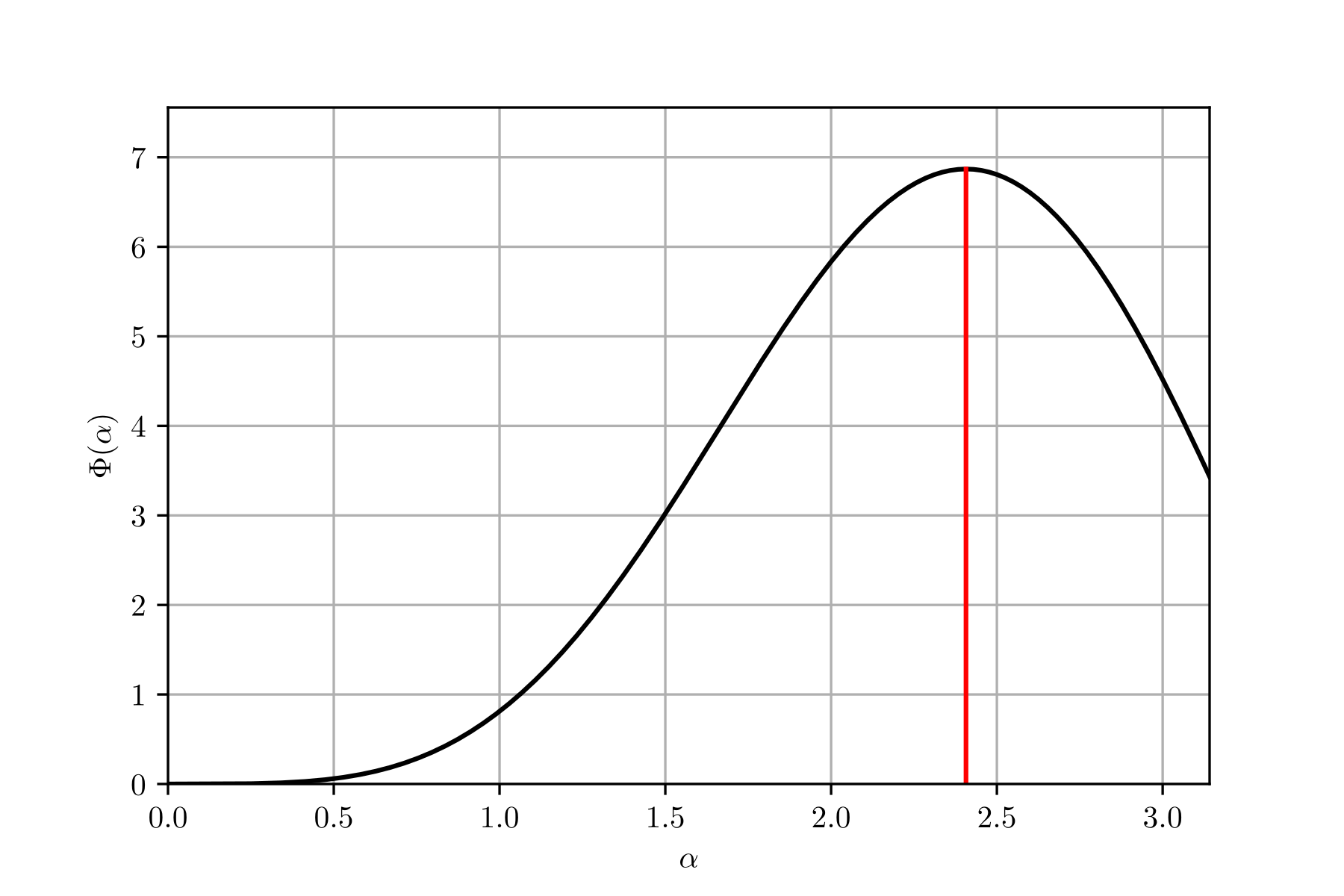
Todellisessa tilanteessa arvioitiin silmämääräisesti, että \(Q=2\). Tällöin \(\overline{\alpha}=\pi\). Välille \([0,\pi]\) generoitiin tasavälein \(n=1\,000\,000\) muuttujan \(\alpha\) arvoa ja laskettiin vastaavat funktionarvot \(\Phi(\alpha)\). Niistä suurin saatiin arvolla \(\alpha\approx 2{,}40690\). Maksimaalisen törmäysenergian antava täyttösuhde on tällöin \(r/R\approx 0{,}56587\). Tulos on hieman suurempi kuin ennakkoarvaus \(0{,}5\). Optimaalista täyttösuhdetta vastaava ensimmäisen törmäyksen ajankohta on \(t/T\approx 0.38307\).
Optimaalisen täyttösuhteen riippuvuus ravistussuhteesta
Ravistussuhde \(Q=R/A\) ajatellaan nyt funktion \(\Phi=\Phi_{{}_Q}\) parametriksi, jonka arvoa muutetaan ja muutoksen vaikutusta tutkitaan. Tietokoneella tehtyjen numeeristen laskujen valossa näyttää siltä, että optimaalinen eli maksimaalisen törmäysenergian antava täyttösuhde \(r/R\) lähestyy raja-arvonaan ykköstä, kun ravistussuhde \(Q\) kasvaa rajatta. Toisaalta, kun ravistussuhde pienenee kohti nollaa, optimitäyttösuhde näyttää laskeutuvan jonnekin arvon \(0{,}43\) tienoille.
.png)
.png)
Optimaalisen täyttösuhteen raja-arvo
Mielenkiinnon vuoksi lasketaan vielä optimaalisen täyttösuhteen tarkka raja-arvo, kun ravistussuhde kasvaa rajatta (\(Q\to\infty\)) tai lähestyy nollaa (\(Q\to 0+\)). Raja-arvoilla tuskin on käytännön merkitystä, sillä kuten eräs kollega totesi, tapauksessa \(Q=10^{-8}\) “tarvitaan pitkäkätinen ravistaja”: jos tölkin korkeuden puolikas on \(R=12\,\)cm, mikä lienee lähellä reaalimaailman arvoa, ravistusliikkeen amplitudin on oltava tähtitieteellinen \(A=12\,000\,\)km. Kenties näinkin ulottuvia ravistajia lymyää maailmankaikkeudessa, mene tiedä. Joka tapauksessa raja-arvot pystytään määrittämään tarkasti ilman, että arvioitavan suureen eli optimaalisen täyttösuhteen lauseketta tunnetaan. Tällainen ei tosin ole mitenkään poikkeuksellista matematiikassa.
Raja-arvo, kun ravistussuhde kasvaa rajatta
Kuvan 4 ensimmäisen käyrän perusteella ehdotetaan optimaalisen täyttösuhteen raja-arvoksi lukua 1 ravistussuhteen kasvaessa rajatta. Näin todellakin on, mikä johtuu siitä, että \(\Phi(\alpha)\) saavuttaa maksiminsa, kun \(0\le\alpha\le\pi\). Silloin \[2\,\frac{R}{A}\left(1-\frac{r}{R}\right) = \beta = \alpha-\sin\alpha \le \alpha \le \pi.\] Kun \(R/A\to\infty\), välttämättä \(r/R\to 1\).
Raja-arvo, kun ravistussuhde hiipuu nollaan
Kuvan 4 alemmasta käyrästä luettuna optimaalinen täyttösuhde on noin \(0{,}43\) hyvin pienillä ravistussuhteen \(Q\) arvoilla. Tarkan raja-arvon määrittämiseksi turvaudutaan valmistelujen jälkeen sinin ja kosinin sarjakehitelmiin: \[\begin{split} \sin\alpha &= \alpha-\frac{\alpha^3}{3!}+\frac{\alpha^5}{5!}-\frac{\alpha^7}{7!}+\ldots\,, \\[1ex] \cos\alpha &= 1-\frac{\alpha^2}{2!}+\frac{\alpha^4}{4!}-\frac{\alpha^6}{6!}+\ldots\,. \end{split}\]
Kineettisen energian \(E_{\rm k}\) lausekkeessa kertoimet \(A\), \(\omega\), \(B\) ja \(\rho\) ovat rehellisiä positiivisia reaalilukuja. Klassisessa fysiikassa kineettinen energia on positiivinen reaaliluku tai nolla. Siksi energian lausekkeessa esiintyvä tekijä \[\Phi(\alpha) = \big(2Q-\varphi(\alpha)\big)(1-\cos\alpha)^2\] on positiivinen tai nolla. Funktion \(\Phi\) maksimikohdassa \(\alpha_{{}_Q}\) on voimassa \(\Phi(\alpha_{{}_Q})>0\). Tällöin \(\varphi(\alpha_{{}_Q})<2Q\). Koska \(0\le\varphi(\alpha_{{}_Q})\), pätee \[\lim_{Q\to 0+}\varphi(\alpha_{{}_Q}) = 0.\] Tämä on mahdollista vain, jos \[\lim_{Q\to 0+}\alpha_{{}_Q}= 0,\] sillä \(\varphi\) on aidosti kasvava bijektio \([0,\infty[\,\to[0,\infty[\). Ilman tarkempaa tutkimista ei ole poissuljettua, että \(\Phi\) saavuttaa suurimman arvonsa useassa eri pisteessä samalla ravistussuhteen \(Q\) arvolla. Raja-arvoyhtälö pätee kaikille näille maksimikohdille.
Raja-arvolaskuissa erittäin käyttökelpoinen merkintä \({\cal O}(1)\) tarkoittaa “maltillista” funktiota, joka ei “räjähdä” nollan ympäristössä. Täsmällisemmin sanottuna funktio \(f\) kuuluu funktioluokkaan \({\cal O}(1)\), jos on olemassa sellaiset positiiviset reaaliluvut \(\delta\) (tyypillisesti pieni) ja \(M\) (tyypillisesti iso), että \(|f(\alpha)|<M\) aina, kun \(0<\alpha<\delta\). Tällöin on varmaa esimerkiksi se, että \[\lim_{\alpha\to 0+}\big(\alpha f(\alpha)\big) = 0.\] Kun funktion \(f\) “hienorakenne” on yhdentekevä, lausekkeissa funktion paikalle kirjoitetaan symboli \({\cal O}(1)\) sen merkiksi, että funktio on edellä tarkoitetussa mielessä rajoitettu nollan ympäristössä. Merkintätapaa selostetaan yleisemmin Wikipedian sivulla [1]. Jos symboli \({\cal O}(1)\) esiintyy laskelmassa tai lausekkeessa useaan kertaan, eri esiintymien takana ei useinkaan ole yksi ja sama funktio. Tähän tottuminen vaatinee hieman harjoittelua.
Täyttösuhteen raja-arvoon päästään käsiksi sinin sarjakehitelmän \[\sin\alpha = \alpha-\frac{\alpha^3}{6}+\alpha^5{\cal O}(1)\] kautta, sillä \[\begin{split} \frac{r}{R} &= 1-\frac{\beta}{2Q} = 1-\frac{\alpha-\sin\alpha}{2Q} = 1-\frac{\frac{\alpha^3}{6}-\alpha^5{\cal O}(1)}{2Q} \\[1ex] &= 1 - \left(\frac{1}{12}- \frac{\alpha^2}{2}\,{\cal O}(1)\right)\frac{\alpha^3}{Q}\,, \end{split}\] ja \[\lim_{Q\to 0+}\frac{\alpha_{{}_Q}^3}{Q} = \frac{48}{7}\,,\] kuten kohta osoitetaan. Silloin optimaaliselle täytölle \(r_{{}_Q}\) saadaan raja-arvo \[\begin{split} \lim_{Q\to 0+}\frac{r_{{}_Q}}{R} &= 1 - \frac{1}{12}\cdot\frac{48}{7} = 1 - \frac{48}{84} = \frac{36}{84} = \frac{3}{7} \\[1ex] &\approx 0{,}428\,571\,428\,571\,\ldots = 0{,}\overline{428\,571}. \end{split}\]
Lemma
\[\lim_{Q\to 0+}\frac{\alpha_{{}_Q}^3}{Q} = \frac{48}{7}\,.\]
Todistus
Funktio \(\Phi\) on jatkuva ja derivoituva, joten maksimikohdassa derivaatta häviää. Funktion \(\Phi\) derivaatta on \[\begin{split}
&\Phi'(\alpha) \\
&\;= (-1+\cos\alpha)(1-\cos\alpha)^2 \\
&\qquad + (2Q-\alpha+\sin\alpha)\cdot 2(1-\cos\alpha)\sin\alpha \\
&\;= (1-\cos\alpha)\big[2\sin\alpha\,(2Q-\alpha+\sin\alpha) \\
&\qquad -(1-\cos\alpha)^2\big].
\end{split}\] Derivaatan eräs nollakohta välillä \([0,\pi]\) on \(\alpha=0\). Muut nollakohdat ratkeavat yhtälöstä \[\begin{split}
&(1-\cos\alpha)^2 = 2\sin\alpha(2Q-\alpha+\sin\alpha) \\
&\quad\Leftrightarrow \\
&(1-\cos\alpha)^2 + 2\sin\alpha(\alpha-\sin\alpha) = 4Q\sin\alpha.
\end{split}\] Sinin ja kosinin sarjakehitelmistä \[\sin\alpha = \alpha-\frac{\alpha^3}{6}+\alpha^5{\cal O}(1),\quad
\cos\alpha = 1-\frac{\alpha^2}{2}+\alpha^4{\cal O}(1)\] saadaan \[\begin{split}
(1-\cos\alpha)^2 &= \left(\frac{\alpha^2}{2}-\alpha^4{\cal O}(1)\right)^2
= \frac{\alpha^4}{4}+\alpha^6{\cal O}(1), \\
\alpha-\sin\alpha &= \frac{\alpha^3}{6}+\alpha^5{\cal O}(1).
\end{split}\] Derivaatan nollakohtayhtälö saa muodon \[\begin{split}
&\frac{\alpha^4}{4}+\alpha^6{\cal O}(1)
+ 2\left(\alpha-\frac{\alpha^3}{6}+\alpha^5{\cal O}(1)\right)
\left(\frac{\alpha^3}{6}+\alpha^5{\cal O}(1)\right) \\[1ex]
&\quad= 4Q\left(\alpha-\frac{\alpha^3}{6}+\alpha^5{\cal O}(1)\right)
\end{split}\] Yhtälön vasen puoli sievenee lausekkeiksi \[\frac{\alpha^4}{4}+2\frac{\alpha^4}{6}+\alpha^6{\cal O}(1)
= \frac{7\alpha^4}{12}+\alpha^6{\cal O}(1).\] Jakamalla nollakohtayhtälön molemmat puolet luvulla \(\alpha\) ja edelleen muokkaamalla yhtälö saadaan muotoon \[\left(\frac{7}{12}+\alpha^2{\cal O}(1)\right)\alpha^3 = 4Q\left(1+\alpha^2{\cal O}(1)\right),\] josta ratkaistaan \[\frac{\alpha^3}{Q}
= \frac{4\big(1+\alpha^2{\cal O}(1)\big)}{\frac{7}{12}+\alpha^2{\cal O}(1)}
\;\xrightarrow[\alpha\to 0]{}\;\frac{48}{7}\,.\quad{\tiny\blacksquare}\]
Viitteet
[1] Wikipedia: Big O notation.
https://en.wikipedia.org/wiki/Big_O_notation
[2] Wikipedia: Inelastic collision.
https://en.wikipedia.org/wiki/Inelastic_collision
Alaviitteet
Tässä tarkoitetaan liike-energiaa siinä vakionopeudella liikkuvassa koordinaatistossa (inertiaalikoordinaatistossa), jonka nopeus yhtyy tölkin nopeuteen törmäyshetkellä. Tämän liike-energian käsittäminen törmäysenergiaksi on fysikaalisesti perusteltu, kun tölkki ja ravistaja ajatellaan suurimassaisena kokonaisuutena, johon massaltaan vähäinen kappale törmää. Ks. [2].↩︎